{kind=link}
1. Introduction
- Course: CoE4TN4 Image Processing
- Chapter: 11 - Image Representation & Description
- Institution: McMaster University
2. Image Representation & Description: Basics
-
After segmentation, regions are represented and described in a form suitable for computer processing using **descriptors**. - Representing a Region:
- External Characteristics: Focus on the boundary. Example: Length of the boundary.
- Internal Characteristics: Focus on properties like color and texture.
- Goal: Descriptors should ideally be insensitive to rotation and translation.
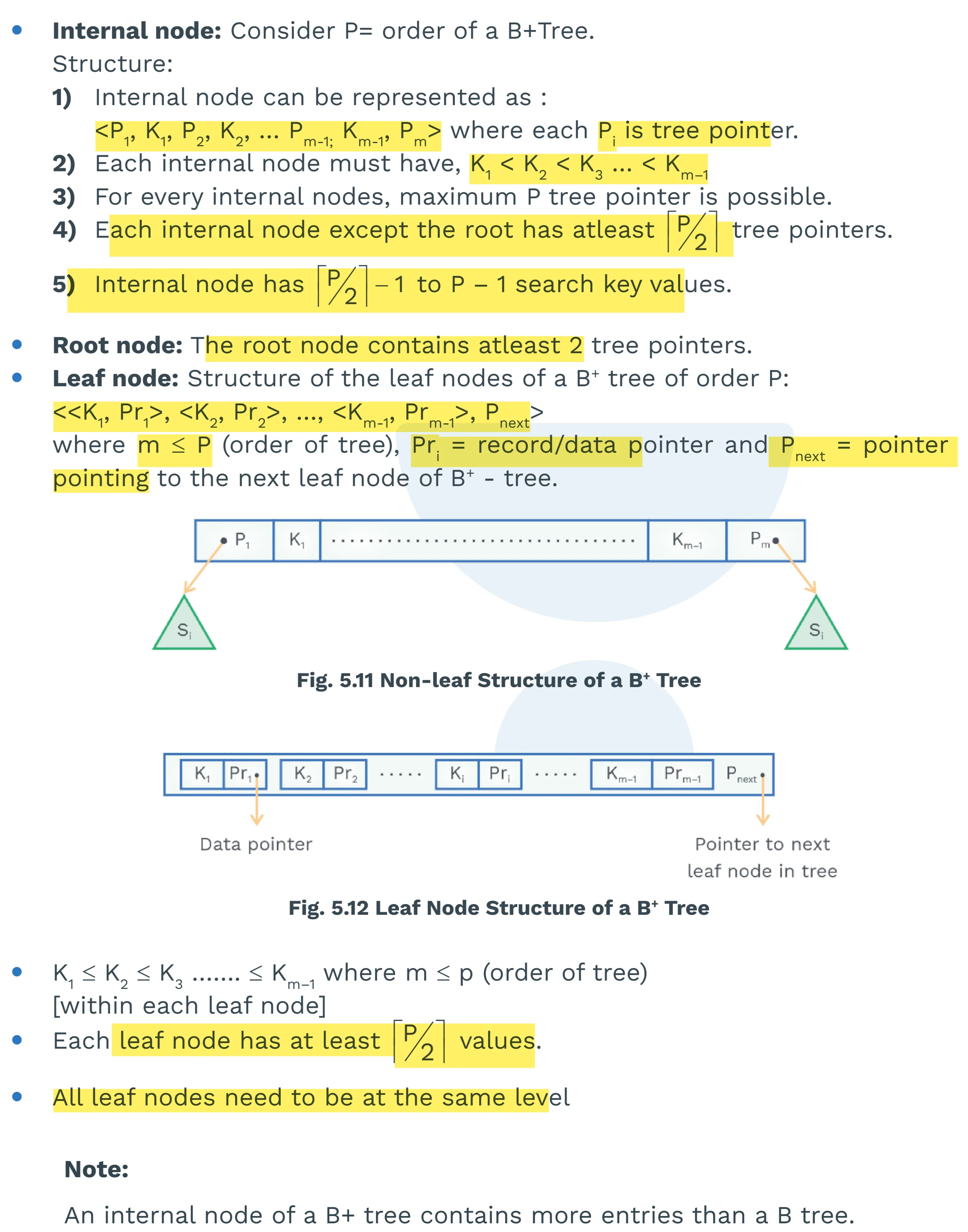
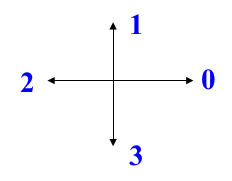
3. Chain Code
-
*Definition:* Represents a boundary by a connected sequence of straight-line segments. -
Uses either 4 or 8 connectivity.
-
Method:
- Follow the boundary (e.g., clockwise).
- Assign a direction code to each segment connecting pixel pairs.
-
Direction Codes (Mermaid Diagram):
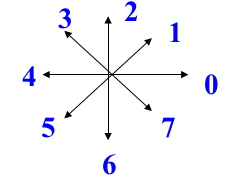
 Exp: 003333232212111001
Exp: 003333232212111001
-
Problems:
- Dependent on the starting point.
- Changes with rotation.
-
Solutions:
- Circular Sequence: Treat the chain code as circular; find the minimum magnitude representation.
- First Difference: Count counterclockwise the number of direction changes between adjacent elements.
- take difference between two consecutive direction number (the latter - the former), and if it is negative, add 4.
- Example, chain code:
- First difference code:
-
Shape Number: is the first difference of smallest magnitude.
4. Signature
-
Definition: A 1-D functional representation of a boundary.
-
Generation Methods:
- Plot distance from centroid to boundary as a function of angle.
-
Example Signatures:
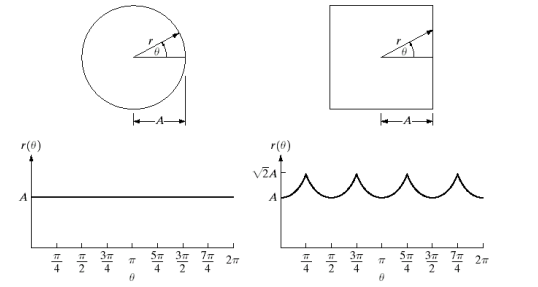
-
Other methods can also be used, such as by plotting the angle between the tangent to the boundary at a specific location and a reference line.
-
Invariance:
- Translation: Signatures are inherently invariant to translation.
- Rotation: Choose a consistent starting point (e.g., farthest from centroid).
- Scaling: Normalize to a specific range.
-
Slope-Density Function: A histogram of tangent-angle values. Peaks correspond to straight segments.
5. Skeletons
- Definition: Represents the structural shape of a region by reducing it to a graph.
- Method: Thinning algorithms (obtain the skeleton).
- Application: Automated inspection.
- Medial Axis Transformation (MAT):
- For each point p in region R with border B, find the closest neighbor in B.
- If p has multiple closest neighbors, it belongs to the medial axis (skeleton).
- Based on the “prairie fire concept.”
6. Simple Boundary Descriptors
- Length: Number of pixels along the contour.
- Diameter: , where and are points on the boundary.
- Curvature: Rate of change of slope. (For digital images, difference between slopes of adjacent segments).
- Major Axis: Straight line segment joining the two farthest points on the boundary.
- Minor Axis: Perpendicular to the major axis, forming a bounding box.
- Eccentricity:
- Basic Rectangle (Bounding Box): Rectangle formed by major and minor axes.
7. Fourier Descriptor
-
Given an N-point boundary represented by coordinates: .
-
Represent the boundary coordinates as a complex sequence:
-
Calculate N point DFT of s(k):
-
are the Fourier Descriptors.
-
By using P of the Fourier descriptors, we can find the following:
- If High frequency details of the boundary will be removed.
-
Properties:
- Not directly insensitive to translation, rotation, and scaling.
- Magnitude of Fourier descriptors is insensitive to rotation.
8. Regional Descriptors
- Area: Number of pixels within a region.
- Compactness:
- Min/Max Gray Levels: Minimum and maximum pixel values in the region.
- Mean and Median Gray Levels: Average and median pixel values.
10. Texture
- Definition: Quantifies smoothness, coarseness, and regularity.
- Approaches:
- Statistical: Uses statistical moments of the histogram.
- Structural: Uses arrangement of image primitives (texture elements).
- Spectral: Based on properties of the Fourier spectrum.
10.1 Statistical Texture
- Moments of Histogram:
- moment:
- Mean:
- Variance (Contrast):
- Relative contrast:
- Third moment (Skewness):
- Uniformity: (Maximum when all gray levels are equal)
- Average Entropy: (Measures variability; zero for a constant image)
- Co-occurrence Matrix
- Histogram-based texture does not take into account relative positions of pixels.
- Let Q be a position operator and G be a matrix.
- is the number of times that two points with gray levels and occur in a relative position specified by Q.
- Then we define as the gray-level co-occurrence matrix, where n is total number of point pairs.
- C depends on Q.
11. Moments
- Moment of order (p+q):
- Central Moments:
- Where and
- Normalized Central Moments: , where